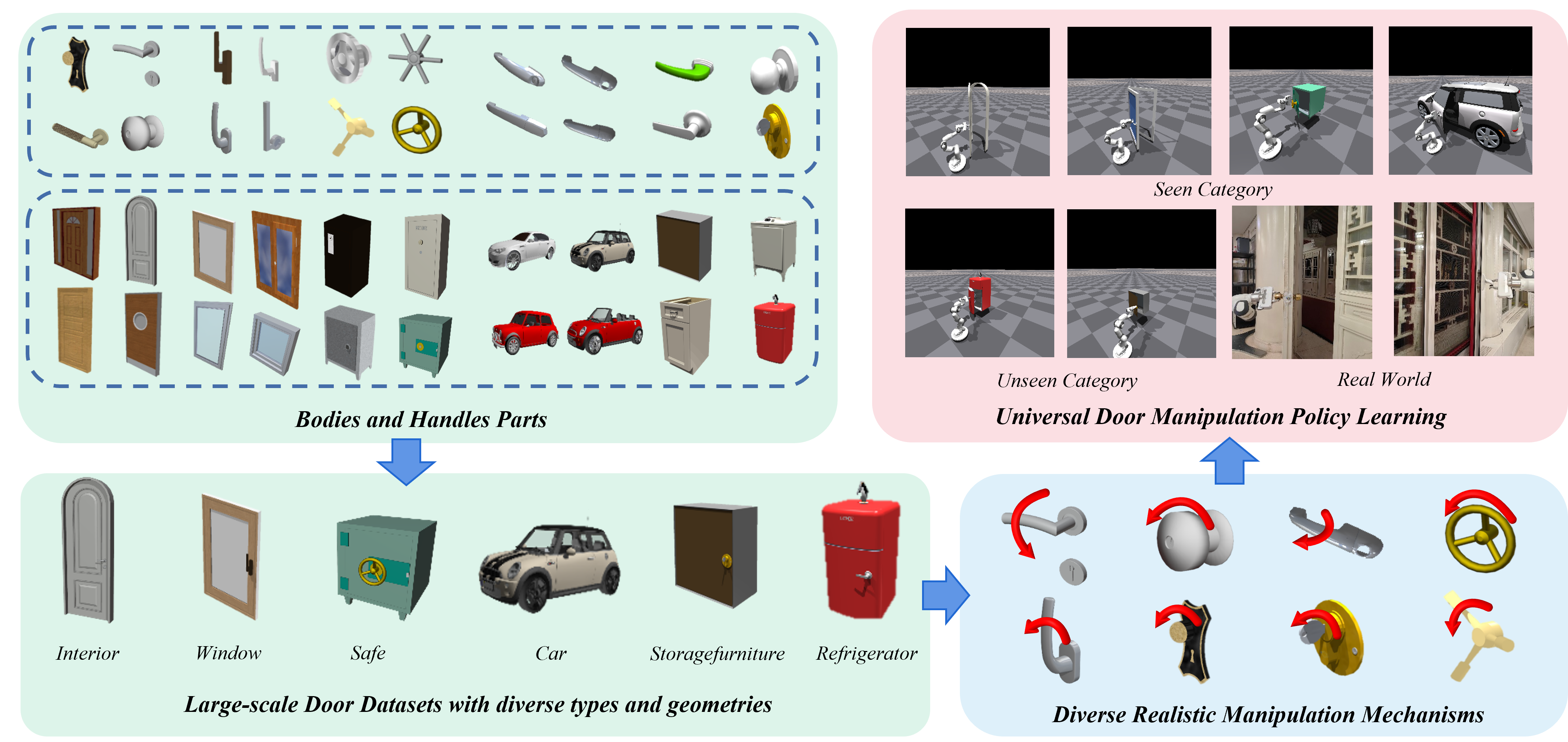
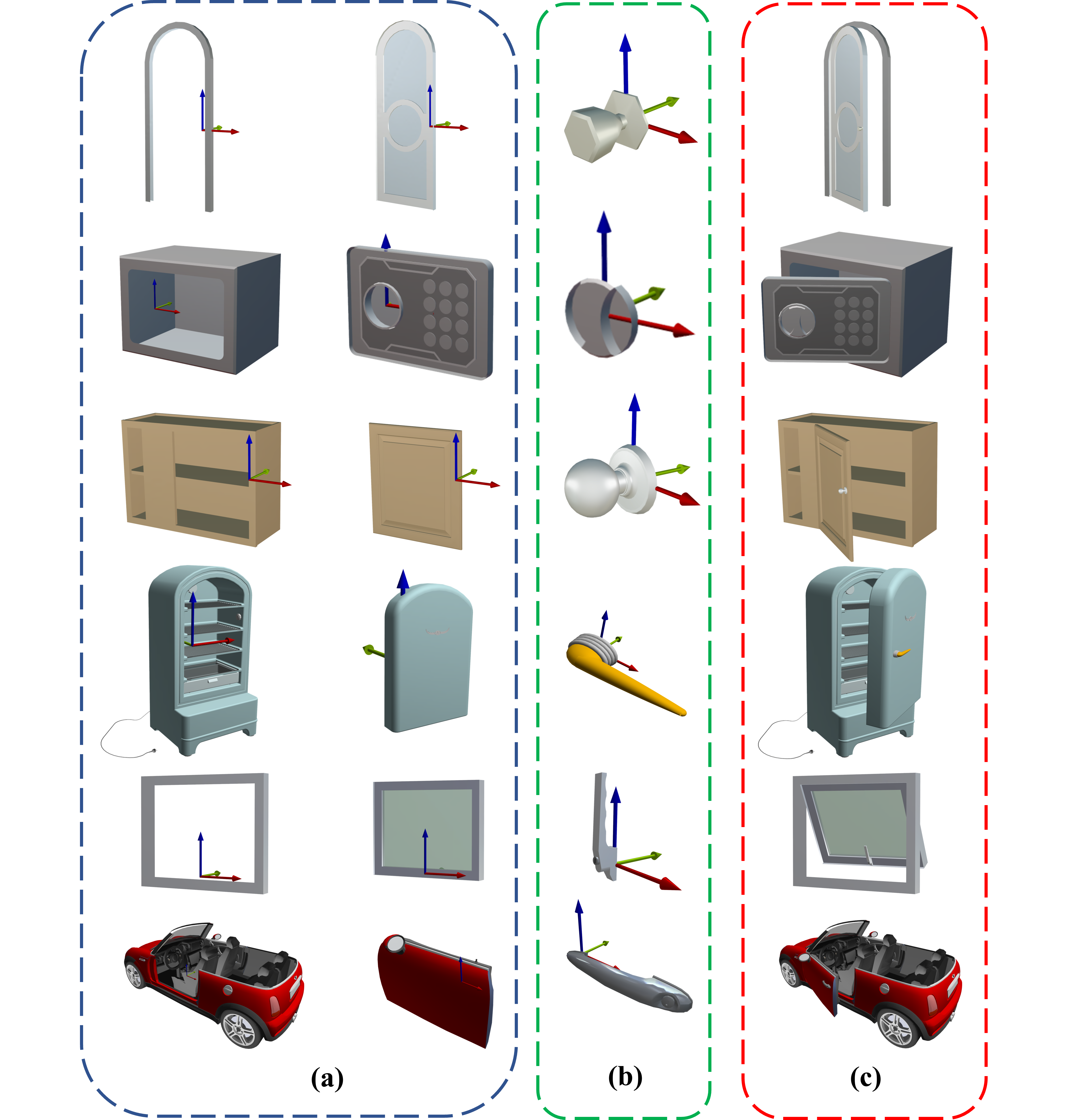
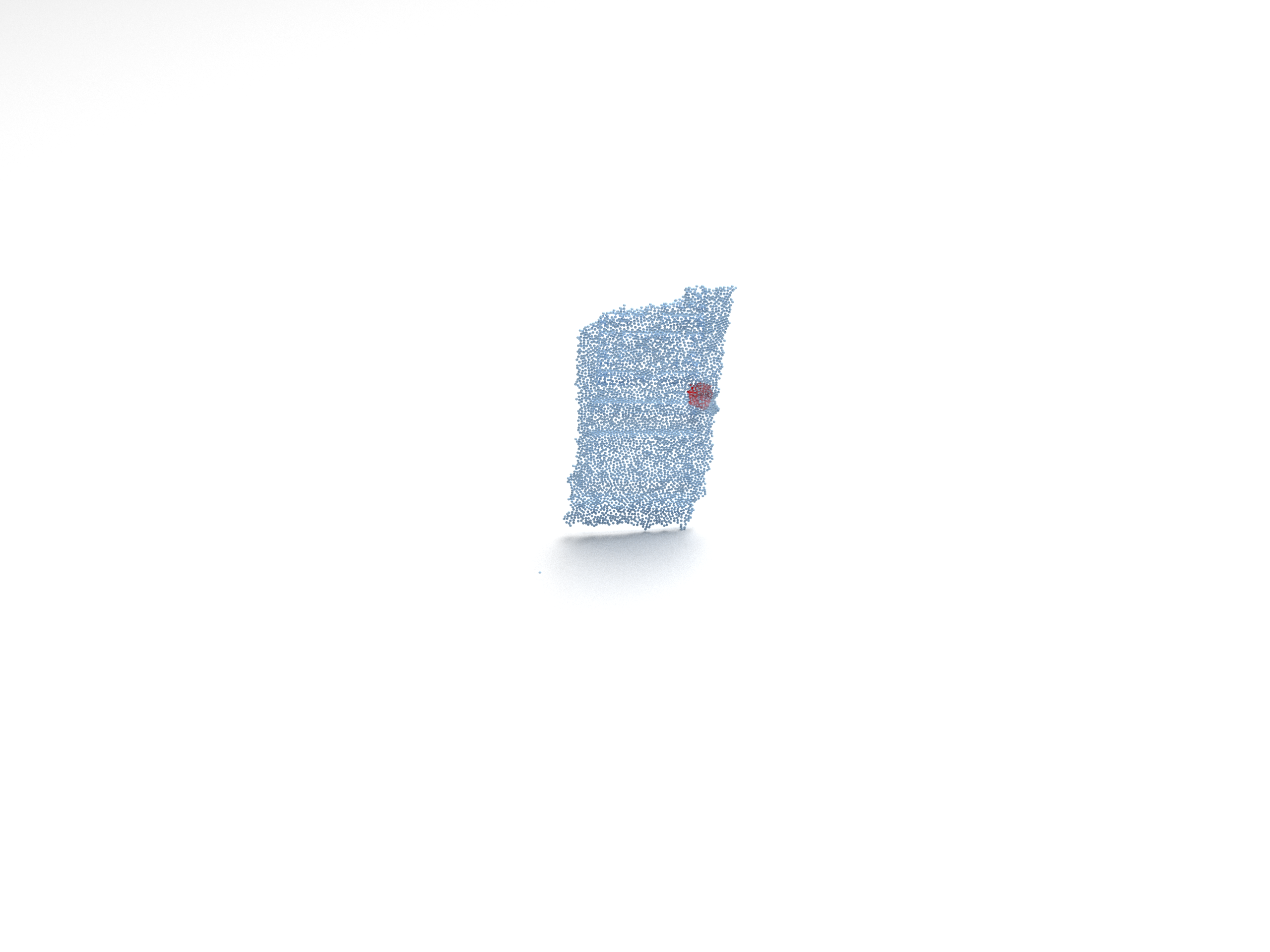
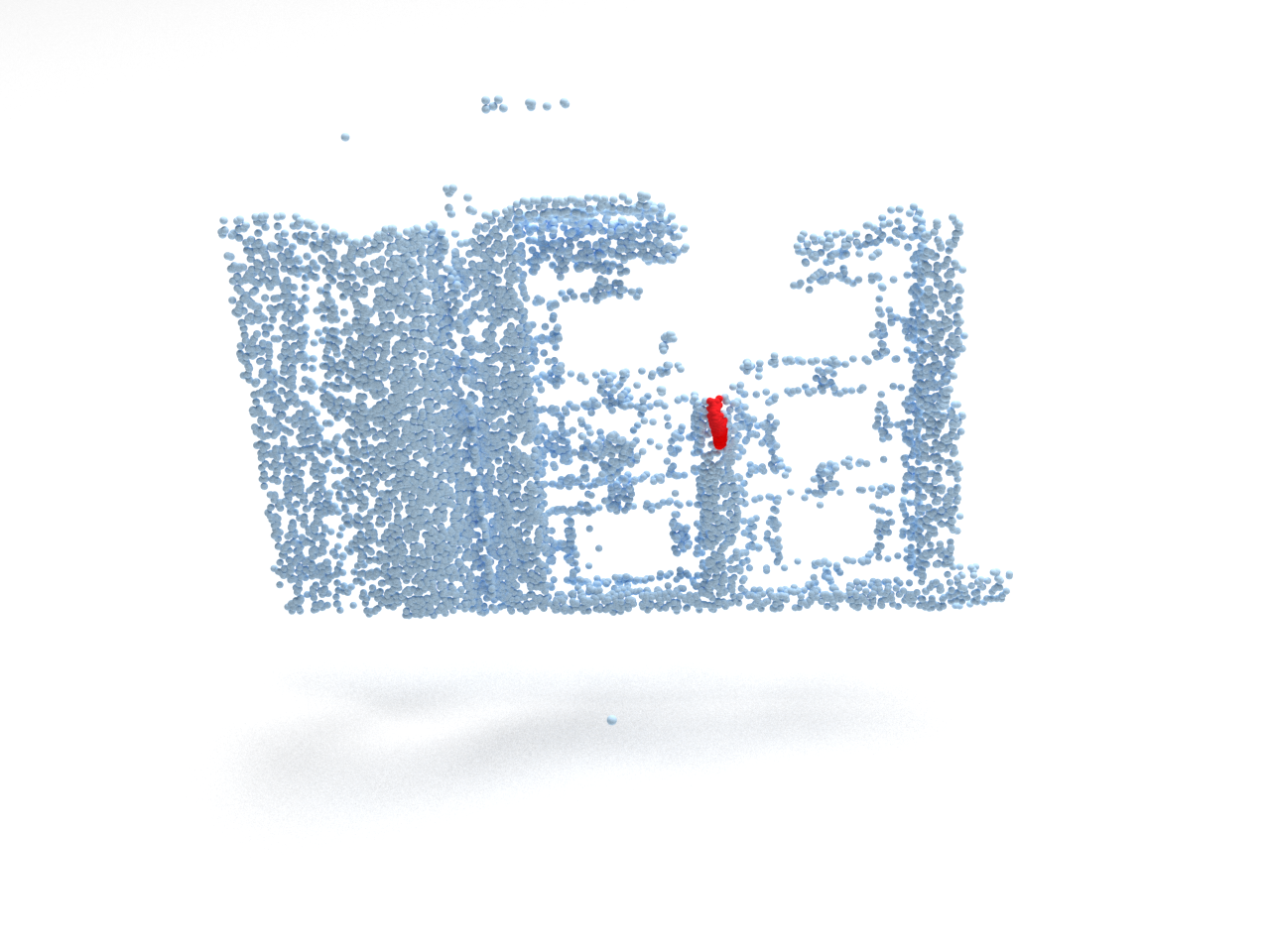
Learning a universal manipulation policy encompassing doors with diverse categories, geometries and mechanisms, is crucial for future embodied agents to effectively work in complex and broad real-world scenarios. Due to the limited datasets and unrealistic simulation environments, previous works fail to achieve good performance across various doors. In this work, we build a novel door manipulation environment reflecting different realistic door manipulation mechanisms, and further equip this environment with a large-scale door dataset covering 6 door categories with hundreds of door bodies and handles, making up thousands of different door instances. Additionally, to better emulate real-world scenarios, we introduce a mobile robot as the agent and use the partial and occluded point cloud as the observation, which are not considered in previous works while possessing significance for real-world implementations. To learn a universal policy over diverse doors, we propose a novel framework disentangling the whole manipulation process into three stages, and integrating them by training in the reversed order of inference. Extensive experiments validate the effectiveness of our designs and demonstrate our framework's strong performance in simulation and real-world.